
1.海凌科离线语音模块百科
HLK-V20-SUIT是海凌科电子推出的一款高性能纯离线语音识别模块,专为智能家居、智能小家电及物联网设备设计,凭借其高性价比、灵活定制化和低功耗特性,成为语音控制领域的热门选择。该模块采用32位RSIC架构核心,集成DSP指令集、FPU浮点运算单元及FFT加速器,通过神经网络算法对音频信号进行深度训练,显著提升语音识别准确率,在安静环境下识别率超过95%,即使在办公室或音乐播放等嘈杂场景中,仍能保持75%以上的识别率,误唤醒率低于1次/24小时,确保设备稳定响应。支持150条本地指令存储,用户可通过海凌科语音定制后台系统自由配置唤醒词、命令词及应答语,无需复杂编程即可快速生成专属SDK,满足个性化需求。模块提供UART、GPIO、PWM等丰富接口,可轻松连接动圈扬声器、驻极体麦克风等外围设备,仅需少量外围元件即可实现语音交互功能,开发周期短,成本可控。其工作电压为5V,平均待机功耗仅63mA,工作电流约60mA,适合电池供电场景,如智能门锁、无线音箱等设备。
该模块尺寸紧凑(封装模块设计),便于集成到各类产品中,尤其适用于空间受限的设备。其应用场景广泛,涵盖智能家居(如语音控制风扇、插座、灯泡、空调)、智能小家电(如智能茶壶、故事机、扫地机)、工业控制(如设备语音操作)、医疗监护(如语音呼叫系统)等领域。例如,用户可通过语音指令“打开空调”或“调暗灯光”,无需手动操作,提升生活便捷性;在工业场景中,工人可通过语音控制设备启动或停止,提高作业效率。支持离线识别,无需联网即可使用,避免了网络延迟或断网导致的功能失效问题,同时保护用户隐私数据。此外,模块兼容轻量级RTOS系统,资源占用低,运行稳定,适合资源有限的嵌入式设备。对于开发者而言,海凌科提供详细的技术文档和开发工具,降低开发门槛,加速产品上市。
综合来看,HLK-V20-SUIT以高性能、低功耗、易定制和广适配性为核心优势,为语音控制设备提供了可靠的解决方案。无论是追求性价比的智能家居厂商,还是需要快速迭代的物联网开发者,该模块均能满足需求,助力产品实现智能化升级。
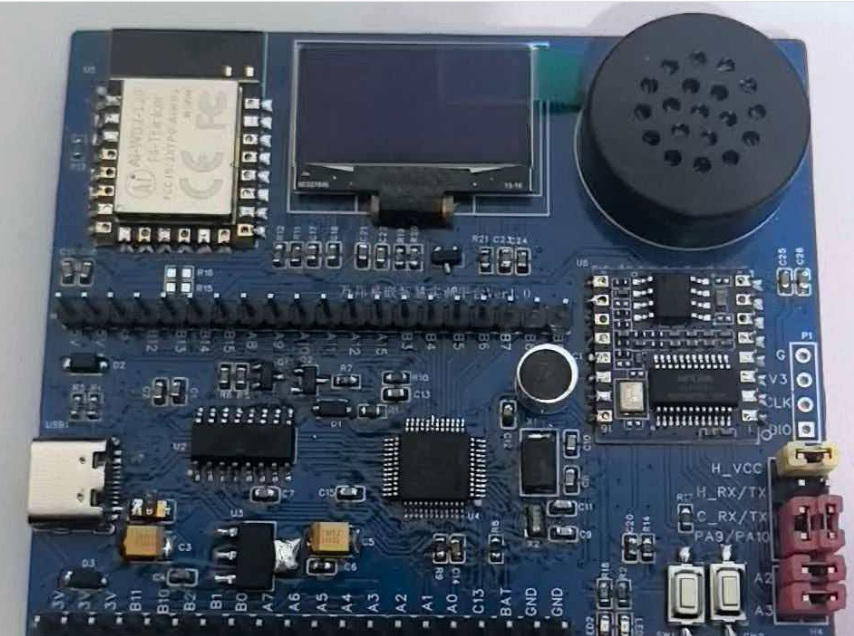
模组实物如下:

2.HLK-V20-SUIT模组集成
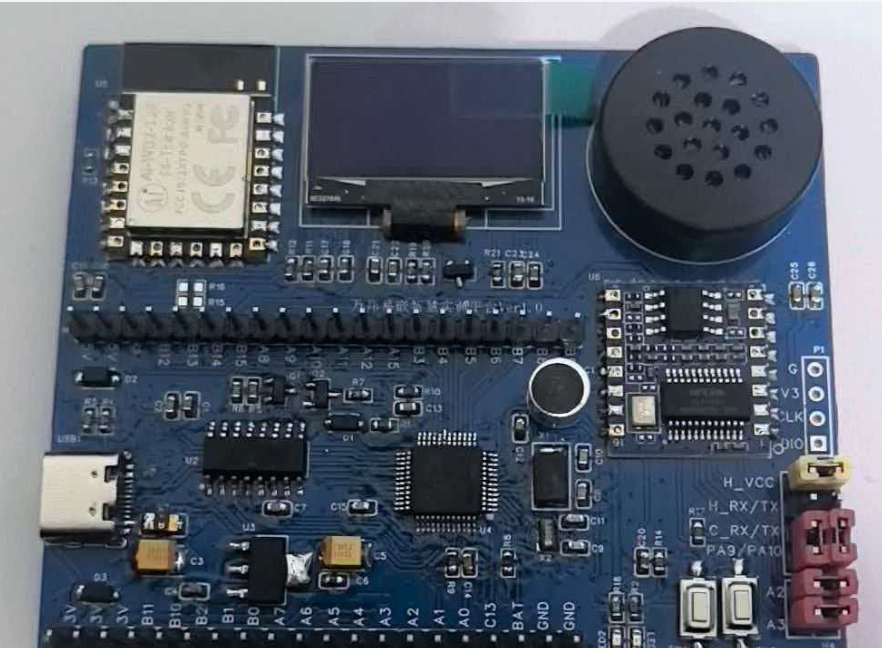
HLK-V20-SUIT模组采用串口通讯方式,语音词条响应成功通过串口返回应答信息,其硬件接口设计如下:
该模组采用5V供电,自带功放电路,直接接入扬声器(8Ω1W)即可输出,麦克风输入也无需外置处理电路,直接接入即可,灵敏度为-38DB。硬件实物如图所示:
3.HLK-V20-SUIT自制语音词条
3.1 创建产品
HLK-V20-SUIT模组支持自定义语音词条,登录海凌科官网,注册账号。海凌科官网地址:[海凌科官网地址](https://www.hlktech.com/)
滑动到最下面可看到语音定制系统。

进行账号注册,登录平台。

选中产品接入,完成产品创建。

选中产品接入,完成产品创建。

3.2 创建SDK


3.3 设置语言词条信息
1.设置前端信号处理。

2.设置串口通讯参数

3.设置语音唤醒词条

4.设置离线词条信息

5.设置应答返回数据格式

6.发音和音量设置

7.其他设置

8.发布SDK,发布成功即可下载SDK包

4.SDK离线包固件烧写
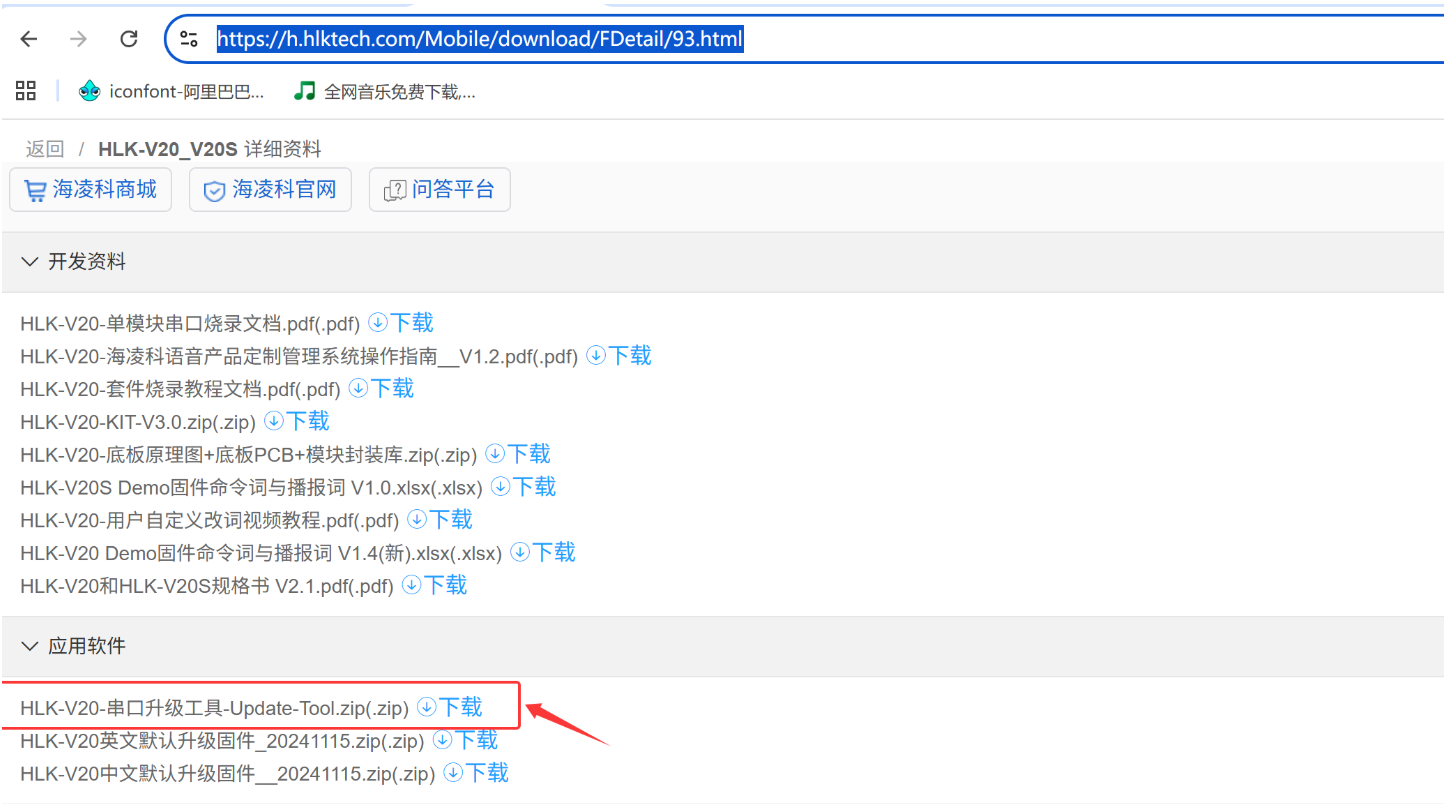
1.下载固件烧写工具。下载地址:[固件烧写工具](https://h.hlktech.com/Mobile/download/FDetail/93.html)
2.本系统板已预留固件升级接口,接口电路如下:
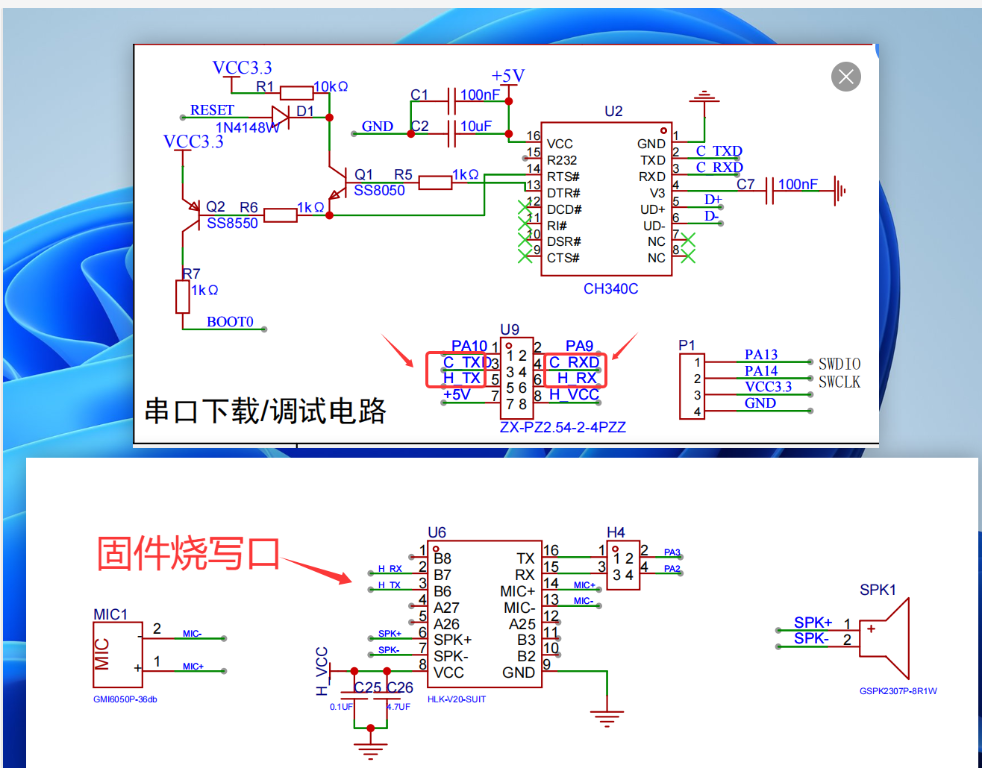
在硬件失实物上,C_RX与PA9连接、TX与PA10连接则是给STM32系统板烧写程序;C_RX与H_RX连接、TX与H_TX连接则是给海凌科模组烧写固件。因此本次需要将跳线帽将C_RX与H_RX连接、TX与H_TX连接。
在下载的SDK包中“uni_hb_m_solution-xxxx-xxxx”目录下的uni_app_debug_update.bin 和uni_app_release_update.bin 是用于 usb 升级的固件。usb升级的固件不能有中文路径。
4.2 驱动安装
使用Type-C数据线与开发板连接,识别成功将自动识别到COM口。

选中好要烧写的uni_app_release_update.bin 文件。

点击烧录按钮, 如图所示,提示栏显示等待设备。(注意:此时设备不要上电)。
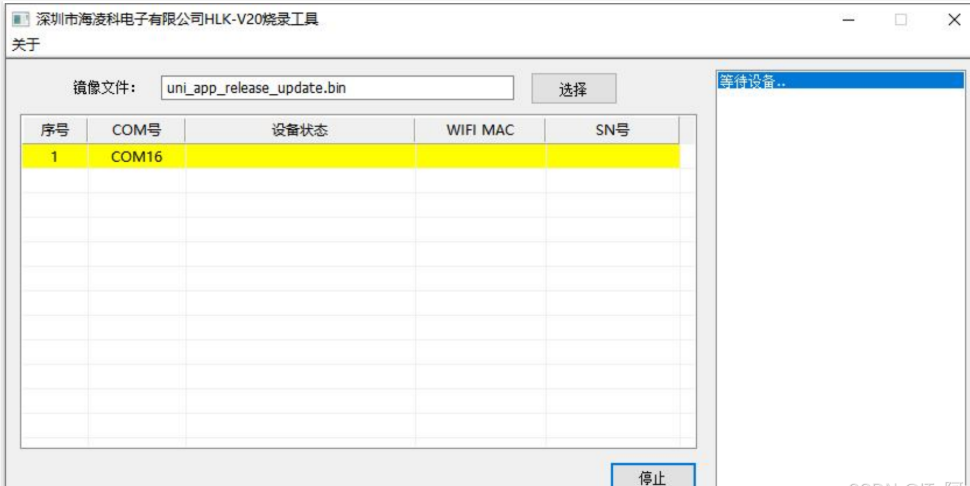
如下图为海凌科模组供电引脚,点击烧录前先拔掉该跳线帽,出现等待设备后再插上该跳线帽。

下载完成如下:
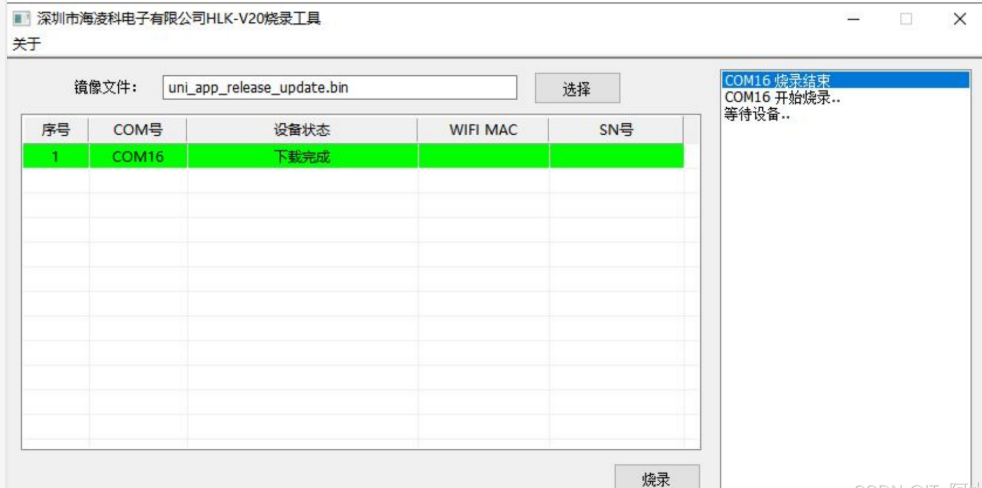
至此,固件烧写完成。
5.模块驱动
HLK-V20模块采用串口串口2驱动,串口通讯波特率为115200,数据帧格式为1bit起始信号+8bit数据位+1bit停止信号,无校验位。驱动程序如下:
/*
串口初始化
形参:USARTx --要初始化的串口(USART1、USART3、USART2)
buad --要设置的波特率
*/
void USARTx_Init(USART_TypeDef *USARTx,u32 buad)
{
if(USARTx == USART1)
{
//1.开时钟
RCC->APB2ENR|=1< <2;//PA
RCC- >APB2ENR|=1< <14;//usart1
RCC- >APB2RSTR|=1< <14;//复位时钟
RCC- >APB2RSTR&=~(1< <14);//取消复位
//2.配置GPIO
GPIOA- >CRH&=0xFFFFF00F;
GPIOA->CRH|=0x000008B0;
USART1->BRR=72000000/buad;//设置波特率
#ifdef USART1_IRQ
USART1->CR1|=1< <4;//IDLE空闲帧中断
USART1- >CR1|=1< <5;//串口接收中断使能
STM32_SetNVICPriority(1,1,USART1_IRQn);//设置优先级,使能中断线
#endif
}
else if(USARTx == USART2)
{
/*1.开时钟*/
RCC- >APB2ENR|=1< <2;//PA时钟
RCC- >APB1ENR|=1< <17;//USART2时钟
RCC- >APB1RSTR|=1< <17;//开复位时钟
RCC- >APB1RSTR&=~(1< <17);//取消复位
/*2.配置GPIO口*/
GPIOA- >CRL&=0xFFFF00FF;//清除原来寄存器中的值
GPIOA->CRL|=0x00008B00;
//3.配置串口3核心功能
USART2->BRR=36000000/buad;//波特率
#ifdef USART2_IRQ
USART2->CR1|=1< <5;//串口2接收中断
USART2- >CR1|=1< <4;//空闲帧中断
STM32_SetNVICPriority(1,1,USART2_IRQn);//设置优先级
#endif
}
else if(USARTx == USART3)
{
//1.开时钟
RCC- >APB2ENR|=1< <3;//PB
RCC- >APB1ENR|=1< <18;//USART3
RCC- >APB1RSTR|=1< <18;//复位时钟
RCC- >APB1RSTR&=~(1< <18);//取消复位
//2.配置GPIO
GPIOB- >CRH&=0xFFFF00FF;
GPIOB->CRH|=0x00008B00;
//3.配置串口3核心功能
USART3->BRR=36000000/buad;//波特率
#ifdef USART3_IRQ
USART3->CR1|=1< <4;//IDLE空闲帧中断
USART3- >CR1|=1< <5;//串口接收中断使能
STM32_SetNVICPriority(1,1,USART3_IRQn);//设置优先级,使能中断线
#endif
}
USARTx- >CR1|=1< <3;//使能发送
USARTx- >CR1|=1< <2;//使能接收
USARTx- >CR1|=1< <13;//使能串口
}
u8 usart2_buffer[1024];//串口1接收数据缓冲区
u16 usart2_cnt=0;//保存数组下班
u8 usart2_flag;//接收完成标志符
void USART2_IRQHandler(void)
{
u8 c;
if(USART2- >SR&1< <5)//判断是否接收中断触发
{
c=USART2- >DR;
// USART1->DR=c;
if(usart2_flag==0)//判断上一次数据是否处理完成
{
if(usart2_cnt< 1024)
{
usart2_buffer[usart2_cnt++]=c;
}
else usart2_flag=1;
}
}
if(USART2- >SR&1< <4)
{
c=USART2- >DR;
c=c;
usart2_flag=1;
}
}
主函数:
#include "stm32f10x.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "usart1.h"
#include "timer.h"
#include "esp8266.h"
#include "oled.h"
#include "rtc.h"
#include < stdio.h >
#include < string.h >
#include < stdlib.h >
int main()
{
LED_Init();//LED
Key_Init();
USARTx_Init(USART1,115200);//一个字符的收发时间:1s/(115200/10)=86us
USARTx_Init(USART2,115200);
USARTx_Init(USART3,115200);
OLED_Init();
OLED_DispalyFont(32,0,16,font_16[0]);
OLED_DispalyFont(32+16,0,16,font_16[1]);
OLED_DispalyFont(32+16*2,0,16,font_16[2]);
OLED_DispalyFont(32+16*3,0,16,font_16[3]);
OLED_Refresh();
RTC_Init();
u16 key=0;
while(1)
{
if(usart2_flag)
{
if(usart2_cnt==3)
{
if(usart2_buffer[0]==0x77 && usart2_buffer[2]==0x0a)
{
switch(usart2_buffer[1])
{
case 1://开灯
LED1=0;
break;
case 7://关灯
LED1=1;
break;
}
}
}
// printf("rx2=%s,%dn",usart2_buffer,usart2_cnt);
usart2_flag=0;
usart2_cnt=0;
}
}
}
- 随机文章
- 热门文章
- 热评文章
- 求职遇到“招转贷”怎么办?人社部回应,求职遇到“招转贷”怎么办?人社部回应
- 太原杏花岭区“博士小院”揭牌成立 助力产学研用深度融合,太原杏花岭区“博士小院”揭牌成立 助力产学研用深度融合
- (活力中国调研行)在中关村展示中心探寻北京科创“密码”,(活力中国调研行)在中关村展示中心探寻北京科创“密码”
- 湖北随州专用汽车产品出口覆盖130个国家和地区,湖北随州专用汽车产品出口覆盖130个国家和地区
- 华康洁净(301235):回购公司股份比例达到3%暨回购完成
- 大盘成长ETF (159203): 博时国证大盘成长交易型开放式指数证券投资基金基金产品资料概要更新
- 湖南裕能(301358):作废部分第二类限制性股票
- 普联软件(300996):北京市中伦律师事务所关于普联软件股份有限公司向不特定对象发行可转换公司债券的补充法律意见书(一)
- 1[风险]嘉实原油LOF (160723): 嘉实原油证券投资基金(QDII-LOF)溢价风险提示公告
- 2广西三地接连发布公告:禁止前往!后果自负!
- 3甜蜜的事业,幸福的滋味……
- 4SCADA系统的NAT转换与网段隔离解决方案
- 5芦苇任中国邮政集团副总经理
- 6A股三大股指集体收涨,沪指续创10年新高,A股三大股指集体收涨,沪指续创10年新高
- 7穆勒矩阵椭偏仪:DVRMME技术的系统误差建模与校准补偿
- 8政策定调催生新主线,A股跨年行情蓄势待发
- 1废砖瓦里砌出风景线 湖南靖州深山村寨美丽嬗变,废砖瓦里砌出风景线 湖南靖州深山村寨美丽嬗变
- 2文科生也可以学医了!多所高校中医学类专业选科放宽,文科生也可以学医了!多所高校中医学类专业选科放宽
- 3湖南零陵发展数字农业 现代农民种粮更轻松,湖南零陵发展数字农业 现代农民种粮更轻松
- 4上午买食材、下午逛潮店 古城老菜场人气足,上午买食材、下午逛潮店 古城老菜场人气足
- 5广东怀集所有国省道主线均已抢通,广东怀集所有国省道主线均已抢通
- 6520分钟攻坚!成渝中线高铁成都站改建工程进度过半,520分钟攻坚!成渝中线高铁成都站改建工程进度过半
- 7广东清远连山紧急转移8名村民 避险山体滑坡,广东清远连山紧急转移8名村民 避险山体滑坡
- 8中意经典著作互译出版项目启动 四部重磅作品首批入选,中意经典著作互译出版项目启动 四部重磅作品首批入选