
在机器人与边缘AI应用中,底层通信的实时性决定了系统的响应速度与控制精度。Jetson Thor作为NVIDIA最新一代嵌入式平台,具备强大的算力与实时推理能力,为EtherCAT网络提供了理想的硬件基础。
通过部署acontis EC-Master主站协议栈,并结合实时内核与优化驱动,我们在Jetson Thor上实现了低抖动、低CPU占用的EtherCAT通信性能,适用于高精度同步控制场景。
一、部署方案:驱动替换与实时内核配置
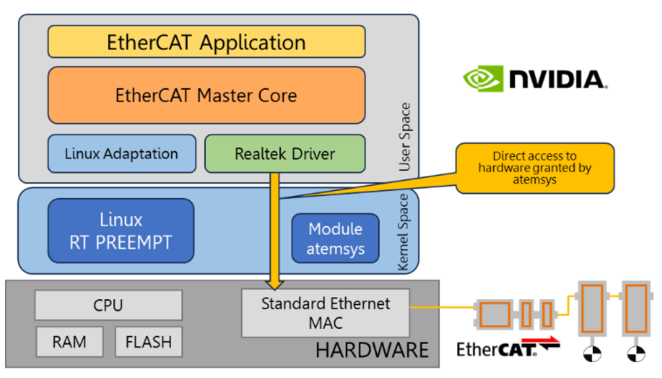
为实现高性能EtherCAT通信,我们在Jetson Thor上采用了acontis提供的实时以太网驱动,并启用了Linux RT PREEMPT内核。Jetson Thor搭载的Realtek网卡默认使用标准驱动,为降低通信抖动并提升确定性,我们将其替换为acontis实时驱动,并通过atemsys模块实现用户态对网卡的直接访问。
操作步骤包括:
- 将标准驱动加入黑名单,避免系统自动加载:

- 加载acontis提供的atemsys模块(需联系盟通科技获取且保存至工作目录):
完成上述配置后,EtherCAT主站协议栈即可通过优化驱动直接访问网卡,实现更高效的帧处理与更稳定的周期控制。系统架构如下图所示:
二、操作步骤详解
1、环境准备
完成驱动替换与实时内核配置后,我们通过EC-Master示例程序EcMasterDemoDc启动EtherCAT主站功能。测试环境包括Jetson AGX Thor(JetPack 7.0)、Linux RT PREEMPT内核、Beckhoff从站设备以及预先生成的ENI配置文件。
2、启动命令
3、参数说明:
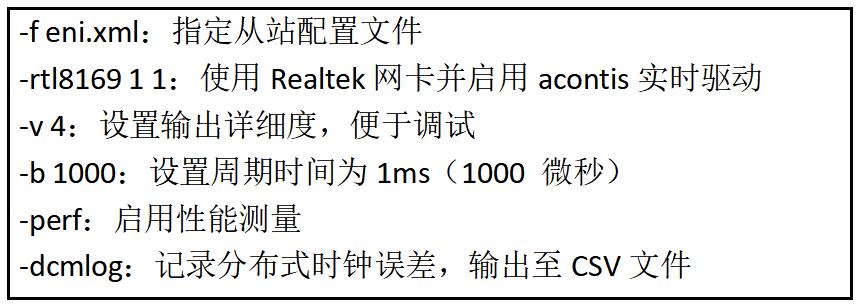
4、性能实测结果
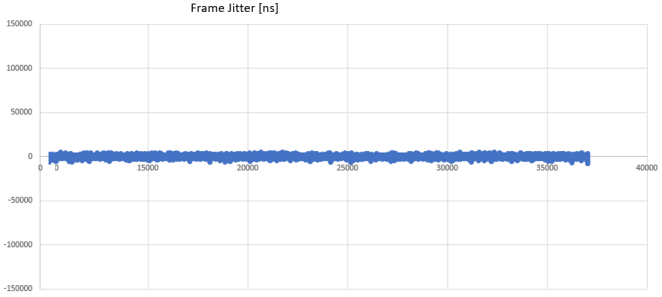
在1ms周期配置下,系统运行稳定,EtherCAT主站协议栈的CPU占用率仅为1.38%。周期性数据帧的抖动控制在±6µs范围内,且分布式时钟误差图中未出现明显峰值,表明系统整体表现出良好的同步性与确定性。
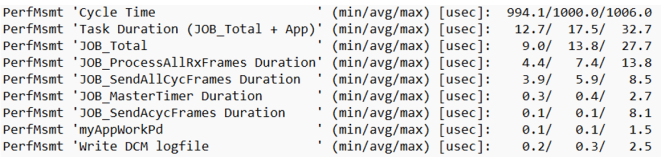
关键指标如下:
- 周期时间偏差(min/avg/max):994.1 / 1000.0 / 1006.0 µs
- 主站任务总耗时(含应用层):平均 17.5 µs
- EC-Master 核心任务耗时:平均13.8 µs
- 抖动范围:±6 µs
- CPU 占用率:约1.38%
除了1ms周期测试,我们还尝试了250µs周期配置,系统同样保持稳定运行,主站任务平均耗时约13.5µs,占用周期时间的5.4%。这表明EC-Master在Jetson Thor上具备处理更高频率控制任务的能力。
上述结果表明,在Jetson Thor平台上部署EC-Master主站协议栈,结合实时内核与优化驱动后,可实现高精度、低延迟的EtherCAT通信性能,满足同步控制场景的实际需求。
三、常见问题解答(Q&A)
Q1:这种EtherCAT主站方案适用于哪些场景?
A1:适用于对同步精度和通信稳定性有较高要求的控制系统,例如人形机器人、智能制造、医疗辅助设备、运动控制平台等。在周期时间低至 250µs 的配置下,系统仍能稳定运行,适合高频率任务。
Q2:低延时和低抖动意味着什么?
A2:意味着主站能更快响应从站数据变化,控制指令更精准,系统整体更稳定。在实际应用中,这直接影响执行器的动作精度、传感器数据的时效性,以及多设备之间的同步协调能力。
Q3:部署这套方案有哪些意义?
A3:通过在Jetson Thor上部署EC-Master主站协议栈,开发者可以实现高精度、低延迟的EtherCAT通信能力,为复杂控制任务提供稳定可靠的底层支撑。这不仅提升了系统响应速度,也为多设备同步、实时数据采集等场景奠定了基础。如需进一步了解部署细节或平台适配情况,欢迎联系盟通科技,我们可协助确认相关技术方案。
四、总结
Jetson Thor + EC-Master的组合,为开发者提供了一个灵活、可扩展的EtherCAT主站平台。通过在Jetson Thor上部署EC-Master主站协议栈并结合实时优化配置,开发者可以在嵌入式平台上实现稳定、高效的EtherCAT通信能力,为复杂控制系统打下坚实基础。
- 随机文章
- 热门文章
- 热评文章
- 河南粮食重点领域贷款余额超2595亿元,河南粮食重点领域贷款余额超2595亿元
- 2025四川国际美酒博览会在德阳绵竹开幕,2025四川国际美酒博览会在德阳绵竹开幕
- 浙江海事部门推客渡运企业“叫应”机制 打通预警“最后一公里”,浙江海事部门推客渡运企业“叫应”机制 打通预警“最后一公里”
- 四川:到2027年、2030年分两步建设文化强省旅游强省,四川:到2027年、2030年分两步建设文化强省旅游强省
- 湘粤合作发展避暑康养产业 共拓大湾区市场,湘粤合作发展避暑康养产业 共拓大湾区市场
- 广东建成15处红树林类自然教育基地,广东建成15处红树林类自然教育基地
- 解码黄金产业发展路径 《2025中国黄金产业区域发展指数白皮书》在蓉首发,解码黄金产业发展路径 《2025中国黄金产业区域发展指数白皮书》在蓉首发
- 中国云南—缅甸工商界经贸合作会议在昆明举行,中国云南—缅甸工商界经贸合作会议在昆明举行
- 1[风险]嘉实原油LOF (160723): 嘉实原油证券投资基金(QDII-LOF)溢价风险提示公告
- 2广西三地接连发布公告:禁止前往!后果自负!
- 3甜蜜的事业,幸福的滋味……
- 4A股三大股指集体收涨,沪指续创10年新高,A股三大股指集体收涨,沪指续创10年新高
- 5穆勒矩阵椭偏仪:DVRMME技术的系统误差建模与校准补偿
- 610月31日港股一般金属及矿石行业沽空数据盘点,洛阳钼业、江西铜业股份、赣锋锂业沽空金额位居行业前三
- 7鸟鸟手持PDA | 扫描快递单PDA巴枪重塑快递行业,实时更新物流信息
- 8第八届进博会闭幕,波士顿科学书写生态协同赋能“健康中国”新答卷,第八届进博会闭幕,波士顿科学书写生态协同赋能“健康中国”新答卷
- 1废砖瓦里砌出风景线 湖南靖州深山村寨美丽嬗变,废砖瓦里砌出风景线 湖南靖州深山村寨美丽嬗变
- 2文科生也可以学医了!多所高校中医学类专业选科放宽,文科生也可以学医了!多所高校中医学类专业选科放宽
- 3湖南零陵发展数字农业 现代农民种粮更轻松,湖南零陵发展数字农业 现代农民种粮更轻松
- 4上午买食材、下午逛潮店 古城老菜场人气足,上午买食材、下午逛潮店 古城老菜场人气足
- 5广东怀集所有国省道主线均已抢通,广东怀集所有国省道主线均已抢通
- 6520分钟攻坚!成渝中线高铁成都站改建工程进度过半,520分钟攻坚!成渝中线高铁成都站改建工程进度过半
- 7广东清远连山紧急转移8名村民 避险山体滑坡,广东清远连山紧急转移8名村民 避险山体滑坡
- 8中意经典著作互译出版项目启动 四部重磅作品首批入选,中意经典著作互译出版项目启动 四部重磅作品首批入选





